


Chúng tôi là một trong những nhà cung cấp FA One-stop chuyên nghiệp nhất tại Trung Quốc. Các sản phẩm chính của chúng tôi bao gồm động cơ servo, hộp số hành tinh, biến tần và PLC, HMI. Các thương hiệu bao gồm Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron, v.v.; Thời gian giao hàng: Trong vòng 3-5 ngày làm việc sau khi nhận được thanh toán. Phương thức thanh toán: T/T, L/C, PayPal, West Union, Alipay, Wechat, v.v.
Chi tiết thông số kỹ thuật
| Mục | Thông số kỹ thuật |
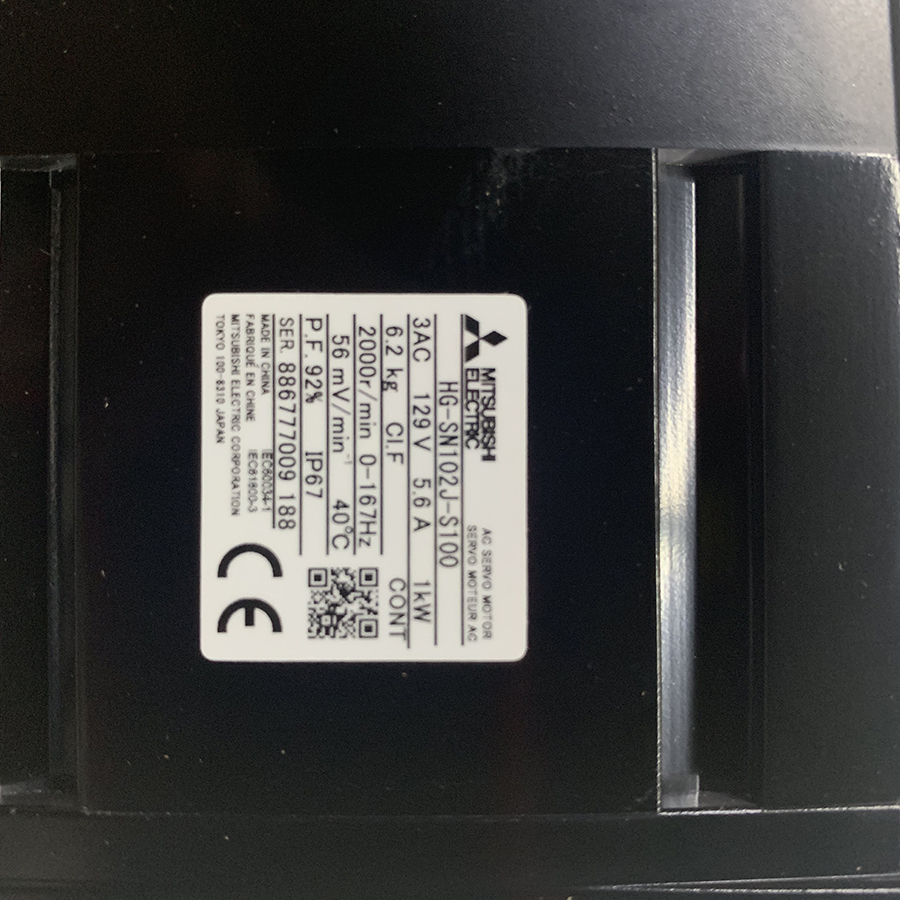
| Người mẫu | HG-SN102J-S100 |
| Thương hiệu | Mitsubishi |
| Tên sản phẩm | Động cơ servo AC |
| Quyền lực | 5,0kW |
| Điện áp | 400V |
| Tính thường xuyên | 900(KHz) |
| Dòng sản phẩm / tên họ | Dòng MELSERVO JE |
| Dòng điện định mức | 5.6A |
| Công suất hoạt động định mức | 1000W / 1kW |
| Mức độ bảo vệ | IP67 |
| Dòng điện tối đa | 17 giờ sáng |
| Tải trọng xuyên tâm tối đa | 980 Bắc |
| Tải trọng trục tối đa | 490 Bắc |
| Mô-men xoắn danh nghĩa | 4,77 Nm |
| Mô-men xoắn cực đại | 14,3 Nm |
| Nghị quyết | 17-bit |
| Kích cỡ | 130mm x130mm x132,5mm |
| Trọng lượng tịnh | 6,2 kg |
Một tín hiệu AC không đổi được đưa vào cuộn dây chính của stato. Tuy nhiên, đúng như tên gọi, cuộn dây điều khiển được cung cấp điện áp điều khiển biến thiên. Điện áp điều khiển biến thiên này được lấy từ bộ khuếch đại servo. Cần lưu ý rằng để có từ trường quay, điện áp đặt vào cuộn dây điều khiển phải lệch pha 90° so với điện áp AC đầu vào.
Rotor: Rotor thường có hai loại: loại lồng sóc và loại cốc cản.
Loại rôto lồng sóc được hiển thị bên dưới: rôto lồng sócỞ loại rôto này, chiều dài lớn trong khi đường kính nhỏ và được chế tạo bằng dây dẫn nhôm nên nhẹ hơn. Cần lưu ý ở đây rằng đặc tính mô-men xoắn-tốc độ của động cơ không đồng bộ thông thường có cả vùng dốc dương và âm tương ứng biểu thị vùng không ổn định và vùng ổn định.
Tuy nhiên, động cơ servo AC được thiết kế để có độ ổn định cao, do đó, đặc tính mô-men xoắn-trượt của nó không được có vùng trượt dương. Cùng với đó, mô-men xoắn phát sinh trong động cơ phải giảm tuyến tính theo tốc độ.
Để đạt được điều này, điện trở mạch rotor phải có giá trị cao, với quán tính thấp. Vì lý do này, khi chế tạo rotor, tỷ lệ đường kính/chiều dài được giữ nhỏ hơn. Khoảng cách không khí giữa các thanh nhôm trong động cơ lồng sóc được thu hẹp giúp giảm dòng điện từ hóa.
Giới thiệu về dòng xe Mitsubishi J4:
Để đáp ứng phạm vi ứng dụng ngày càng mở rộng, bao gồm sản xuất chất bán dẫn và LCD, robot và máy chế biến thực phẩm, MELSERVO-J4 kết hợp với các dòng sản phẩm khác của Mitsubishi Electric như bộ điều khiển chuyển động, mạng, thiết bị đầu cuối đồ họa, bộ điều khiển lập trình, v.v. Điều này mang lại cho bạn sự tự do và linh hoạt để tạo ra một hệ thống servo tiên tiến hơn.
-Giới thiệu về dòng xe Mitsubishi J5:
(1) Tính tiến bộ
Đối với sự tiến hóa của máy móc
Cải thiện hiệu suất
Chuẩn hóa chương trình
(2)Kết nối
Đối với hệ thống linh hoạt
Cấu hình
Tích hợp với các thiết bị có thể kết nối
(3) Khả năng sử dụng
Để bắt đầu hoạt động nhanh chóng
Cải tiến công cụ
Cải thiện khả năng sử dụng hệ thống ổ đĩa
(4) Khả năng bảo trì
Để phát hiện kịp thời và
chẩn đoán lỗi
Bảo trì dự đoán/phòng ngừa
Bảo trì khắc phục
(5)Di sản
Để sử dụng hiện có
(6)thiết bị
Khả năng hoán đổi với trước đó
(7)mô hình thế hệ
-Giới thiệu về dòng sản phẩm JET Mitsubishi
-Giới thiệu về dòng xe JE Mitsubishi
-Giới thiệu về dòng xe JN Mitsubishi
-

MR-J2S-70B-PY135U054 Bộ truyền động Mitsubishi cho servo...
-

Trình điều khiển bộ khuếch đại Mitsubishi Original MR-J3-100B
-

Động cơ Servo Mitsubishi HF-KR13BJ Nhật Bản
-

Trình điều khiển Servo Mitsubishi Nhật Bản mới và nguyên bản ...
-

Trình điều khiển Servo Mitsubishi Nhật Bản MR-JE-100A
-

Bộ truyền động động cơ Mitsubishi AC Servo MR-J2S-60A4




